ImSwitch OS (based on Forklift)
The ImSwitch ImSwitch OS is a complete, pre-configured operating system image designed specifically for UC2 microscopy systems. It provides a ready-to-use environment with all software, drivers, and configurations pre-installed.
Images and Screenshots
The ImSwitch OS comes with a visual installer and desktop environment:
 ImSwitch OS desktop environment with pre-installed applications
ImSwitch OS desktop environment with pre-installed applications
 ImSwitch configuration interface for hardware setup
ImSwitch configuration interface for hardware setup
 Docker containers running ImSwitch services
Docker containers running ImSwitch services
Overview
The ImSwitch OS is a specialized Raspberry Pi OS image that includes:
- ImSwitch with all dependencies pre-installed
- UC2-REST Python interface for ESP32 communication
- UC2-ESP32 firmware flashing tools
- Docker with pre-built ImSwitch containers
- Camera drivers for supported hardware
- Configuration templates for common setups
- Web interface for remote control
Features
Pre-Installed Software
- ImSwitch Core: Latest stable version with all modules
- Docker Environment: Pre-built containers ready to run
- UC2-REST Library: Python interface for hardware control
- Firmware Tools: ESP32 flashing utilities and firmware
- Development Tools: Python, Git, VS Code Server (optional)
Hardware Support
- Cameras: HIK, Daheng, Raspberry Pi, USB cameras
- Motors: UC2-ESP32 controlled stages and focus systems
- Illumination: LED arrays, lasers, matrix displays
- Sensors: Environmental monitoring, feedback systems
Network Features
- WiFi Hotspot: Create isolated network for microscope control
- Web Interface: Browser-based control panel (Cockpit)
- SSH Access: Remote terminal access
- VNC Server: Remote desktop access
Installation
Requirements
- Raspberry Pi 4 (4GB RAM minimum, 8GB recommended)
- MicroSD Card (32GB minimum, Class 10 or better)
- UC2 Hardware (optional for initial setup)
Step 1: Download Image
# Download the latest Forklift OS image or go to Zenodo and download it here https://zenodo.org/records/14988987
wget https://zenodo.org/records/14988987/files/rpi-uc2-27f9a21.zip?download=1
Step 2: Flash to SD Card
Using Raspberry Pi Imager (Recommended):
- Download Raspberry Pi Imager
- Select "Use custom image" and choose the downloaded .img.xz file
- Select your SD card
- Click "Write" and wait for completion
Using dd (Linux/macOS):
# Extract image
xz -d imswitch-forklift-os.img.xz
# Flash to SD card (replace /dev/sdX with your SD card device)
sudo dd if=imswitch-forklift-os.img of=/dev/sdX bs=4M status=progress
sync
Step 3: First Boot
- Insert SD card into Raspberry Pi
- Power on the Raspberry Pi
- Observe for an SSID with name
openuc2-XXX-XXX-XXX
Configuration
Initial Setup
Access Methods:
- SSH:
ssh pi@openuc2-xxxx-xxxx-xxx.local(default password:youseetoo, default login:pi) - Web Interface:
http://imswitch-pi.local:8001
Default Credentials:
- Username:
pi - Password:
youseetoo - SSH: Enabled by default
Network Configuration
WiFi Hotspot Mode:
# Enable hotspot mode (creates isolated network)
sudo systemctl enable hostapd
sudo systemctl enable dnsmasq
# Configure hotspot settings
sudo nano /etc/hostapd/hostapd.conf
Client Mode (Connect to existing WiFi):
# Use the desktop WiFi settings or command line
sudo raspi-config
FireWall Settings*:
If you haven't explicitly configured the firewall to allow traffic into a dedicated port (e.g. 8005) from the outside world you have to explicitly open it by doing:
ImSwitch runs on 8001 (REST), 8002 (SOCKET) per default:
sudo firewall-cmd --zone=public --add-port=8001/tcp; sudo firewall-cmd --zone=nm-shared --add-port=8001/tcp
sudo firewall-cmd --zone=public --add-port=8002/tcp; sudo firewall-cmd --zone=nm-shared --add-port=8002/tcp
in an SSH session on the RPi. Then you can test this is by doing curl localhost:8005 (e.g. if you run a python server as python -m http.server 8005). If you get valid HTML, then it's extremely likely that the firewall is blocking external access to port 8005.
ImSwitch Configuration
For detailed information about ImSwitch configuration files, see the Configuration Guide.
Quick Start Configuration:
# Navigate to configuration directory
cd /home/pi/ImSwitchConfig
# Copy a template configuration
Configuration files are stored in `/home/pi/Documents/ImSwitchConfig/config/` and can be edited using the desktop interface or via SSH.
# Edit configuration for your hardware
nano config/imcontrol_options.json #=> enter the name you want to use
Usage
Web Interface
The Forklift OS includes a web-based control interface accessible at:
- Local:
http://localhost:8001 - Network:
http://opencu2-XXX-xxx-xxx.local:8001
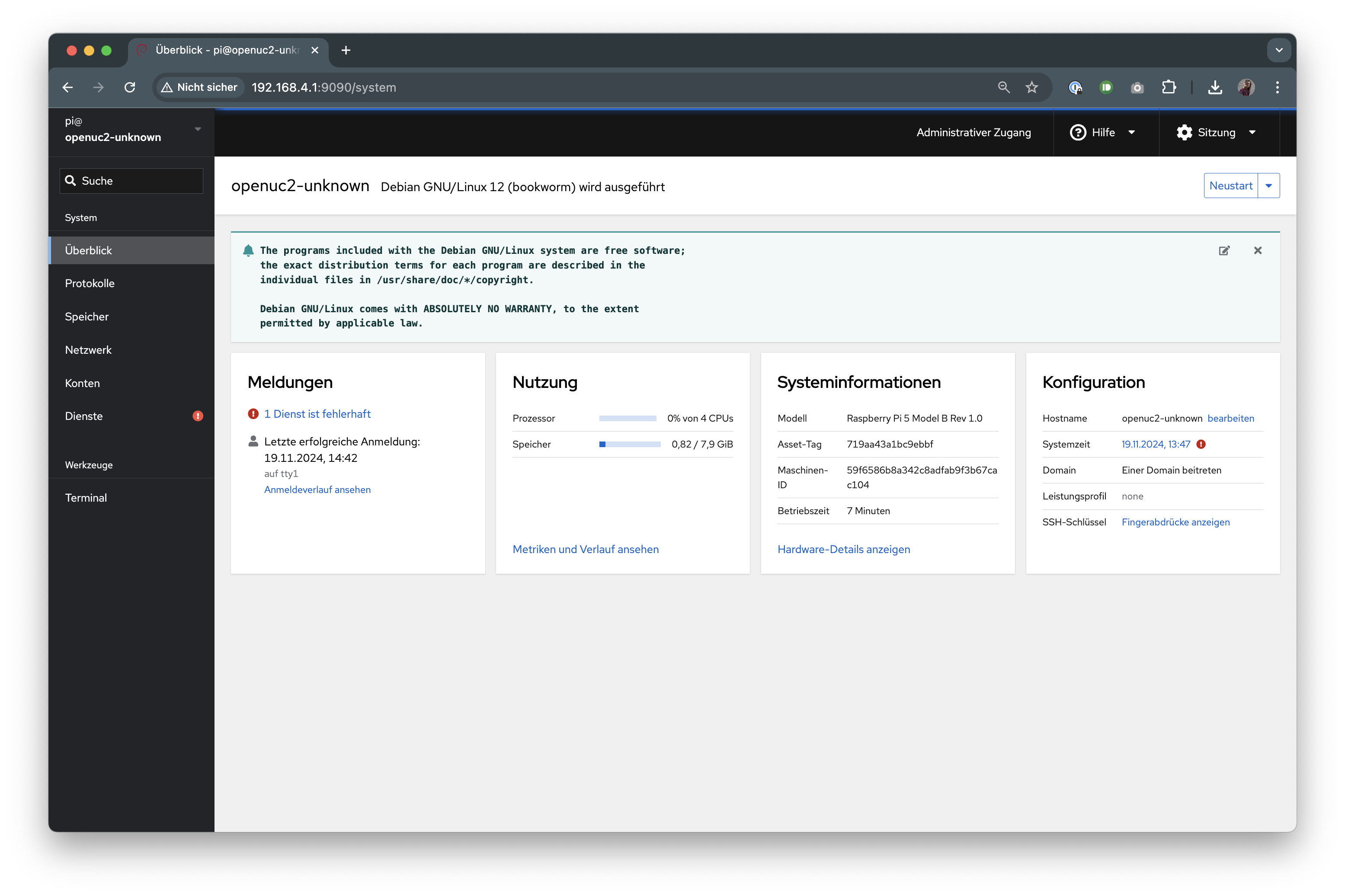
Web Interfaces
The ImSwitch OS provides several web interfaces for remote access:
- Cockpit Web Console: Available at
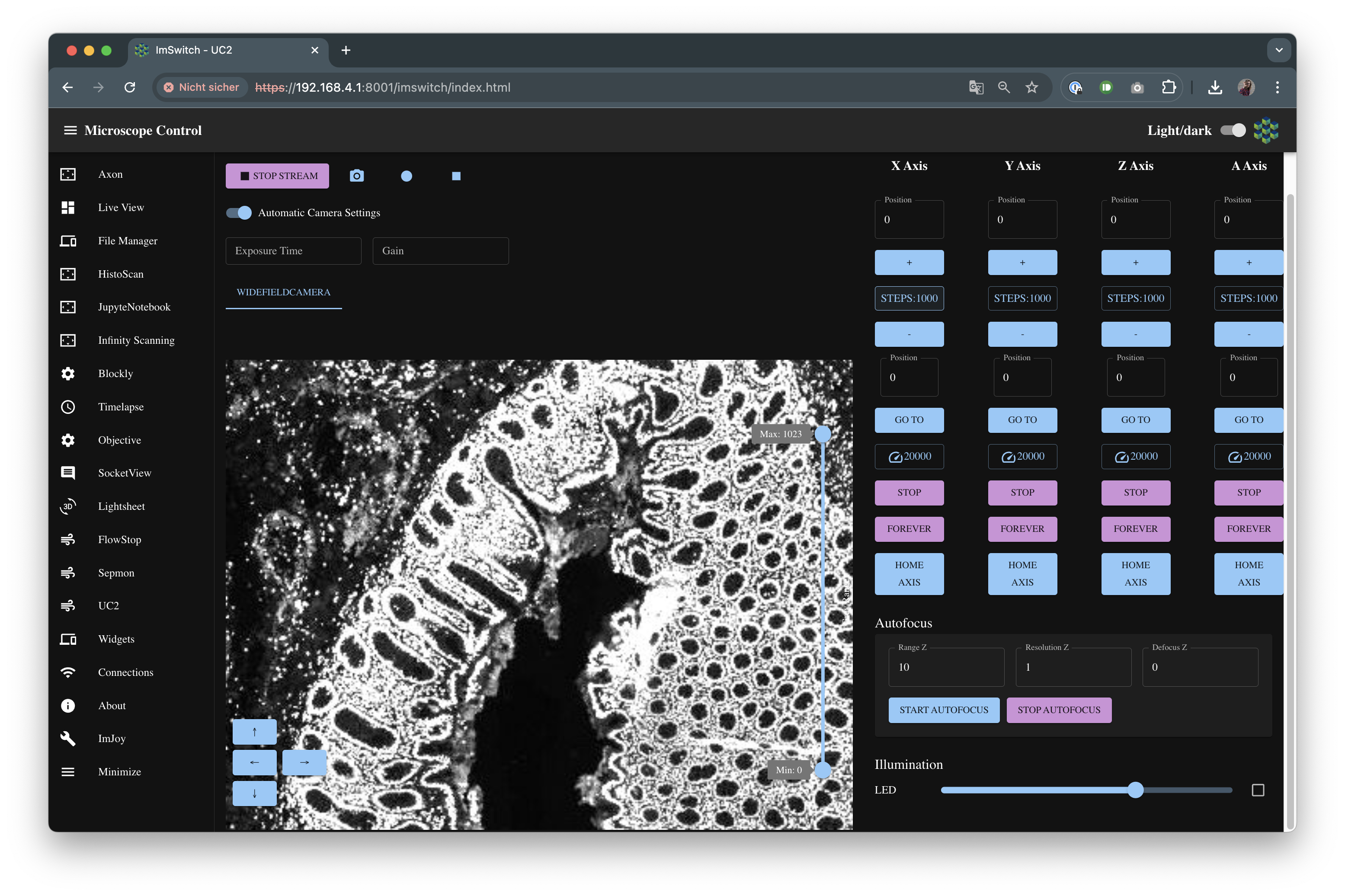
http://[raspberry-pi-ip]:9090/admin/cockpit/for system administration - ImSwitch React Interface: Available at
http://[raspberry-pi-ip]:8001/imswitch/index.htmlfor microscope control - Swagger API UI: Available at
http://[raspberry-pi-ip]:8001/docs - WebSocket Control: Available at
http://[raspberry-pi-ip]:8002for real-time data streams actually it's https by default to connect to it via a statically hosted website e.g. https://youseetoo.github.io/imswitch/index.html
Features:
- Live camera feed
- Motor control
- LED/laser control
- Configuration management
- System monitoring
System Management
Update ImSwitch:
forklift pallet upgrade --force @main
Advanced Features
Custom Configurations
Hardware Configuration:
# Edit hardware configuration
nano /home/pi/ImSwitchConfig/imcontrol_setups/my_setup.json
# Set as active configuration
echo '{"setupFileName": "my_setup.json"}' > /home/pi/ImSwitchConfig/config/imcontrol_options.json
Scripting:
# Custom scripts directory
ls /home/pi/ImSwitchConfig/scripts/
# Add your custom scripts
cp my_script.py /home/pi/ImSwitchConfig/scripts/
Troubleshooting
Common Issues
Check docker compose is running:
docker ps
Docker Compose Services
The ImSwitch OS includes a pre-configured docker-compose setup with the following services:
version: '3.8'
services:
imswitch:
image: ghcr.io/openuc2/imswitch-noqt-x64:latest
ports:
- "8001:8001"
- "2222:22"
environment:
- HEADLESS=1
- HTTP_PORT=8001
- CONFIG_FILE=example_uc2_hik_flowstop.json
- UPDATE_GIT=0
- UPDATE_CONFIG=0
volumes:
- /home/pi/Documents/ImSwitchConfig:/config
- /home/pi/Documents/ImSwitchData:/data
privileged: true
restart: unless-stopped
portainer:
image: portainer/portainer-ce:latest
ports:
- "9000:9000"
volumes:
- /var/run/docker.sock:/var/run/docker.sock
- portainer_data:/data
restart: unless-stopped
volumes:
portainer_data:
This setup provides:
- ImSwitch: Main microscopy control application
- Portainer: Docker container management interface
- Persistent Data: Configuration and data volumes for data retention
Hardware not detected:
# Check USB devices
lsusb
# Check serial ports
ls /dev/tty*
# Check permissions
sudo usermod -a -G dialout pi
Network issues:
# Check network status
ip addr show
# Restart network services
sudo systemctl restart dhcpcd
sudo systemctl restart hostapd
Log Files
Important log locations:
- ImSwitch:
/home/pi/.imswitch/logs/ - System:
/var/log/syslog - Docker:
journalctl -u imswitch-docker
Recovery
Reset to defaults:
# Reset ImSwitch configuration
rm -rf /home/pi/ImSwitchConfig/config/*
# then restart imswitch
Updates and Maintenance
Manual Updates
For manual updates, use the provided update script:
# Update ImSwitch Docker containers
bash ~/Desktop/update_docker_container.sh
# Or manually pull latest images
sudo docker-compose down
sudo docker pull ghcr.io/openuc2/imswitch-noqt-x64:latest
sudo docker-compose up -d
Update Components
# Update ImSwitch configuration files
cd /home/pi/Documents/ImSwitchConfig
git pull origin master
# Update UC2-REST library
pip install --upgrade UC2-REST
# Update ESP32 firmware tools
cd /home/pi/uc2-esp32
git pull origin main
Support and Resources
Getting Help
- Documentation: This guide and linked resources
- GitHub Issues: ImSwitch OS Repository
- Community Forum: openUC2.com
- Email Support: Contact via GitHub or forum
Related Projects
- ImSwitch Core: ImSwitch Repository
- UC2-REST: UC2-REST Repository
- UC2-ESP32: UC2-ESP32 Firmware
Next Steps
After setting up Forklift OS:
- Configure your hardware - Set up specific devices
- Basic usage tutorial - Learn ImSwitch operation
- Advanced tutorials - Explore advanced features